MultiLayerSearch using A*. More...
#include <multilayersearch.h>
 Inheritance diagram for FIFE::MultiLayerSearch:
Inheritance diagram for FIFE::MultiLayerSearch: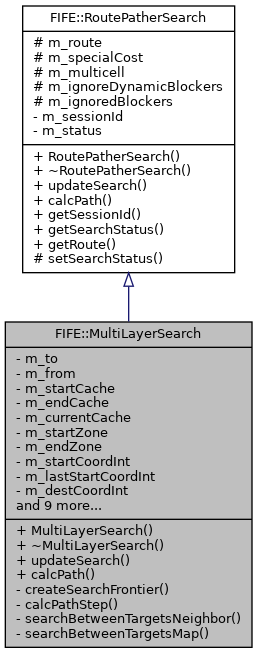 Collaboration diagram for FIFE::MultiLayerSearch:
Collaboration diagram for FIFE::MultiLayerSearch: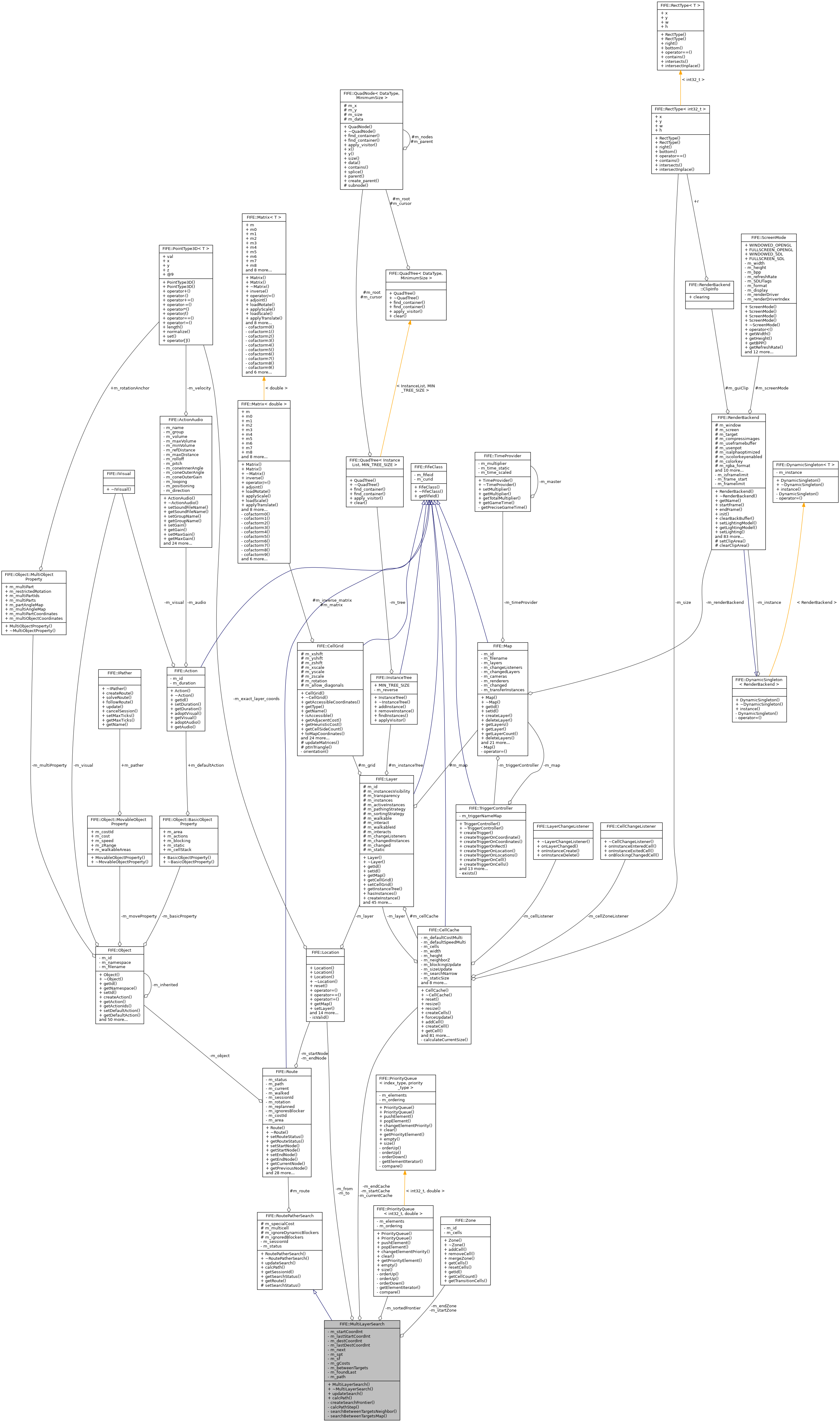
Public Member Functions | |
| MultiLayerSearch (Route *route, const int32_t sessionId) | |
| Constructor. More... | |
| ~MultiLayerSearch () | |
| Destructor. More... | |
| void | updateSearch () |
| Updates the search. More... | |
| void | calcPath () |
| Calculates final path. More... | |
| Public Member Functions inherited from FIFE::RoutePatherSearch | |
| RoutePatherSearch (Route *route, const int32_t sessionId) | |
| Constructor. More... | |
| virtual | ~RoutePatherSearch () |
| int32_t | getSessionId () const |
| Retrieves the session id. More... | |
| int32_t | getSearchStatus () const |
| A small function which returns the current status of the search. More... | |
| Route * | getRoute () |
| Returns the associated route for this search. More... | |
Private Member Functions | |
| void | createSearchFrontier (int32_t startInt, CellCache *cache) |
| Creates or resets the SearchFrontier. More... | |
| void | calcPathStep () |
| Calculates path parts per layer. More... | |
| void | searchBetweenTargetsNeighbor () |
| Fetch targets from neighbor layers. More... | |
| void | searchBetweenTargetsMap () |
| Fetch targets from map. More... | |
Private Attributes | |
| Location | m_to |
| A location object representing where the search started. More... | |
| Location | m_from |
| A location object representing where the search ended. More... | |
| CellCache * | m_startCache |
| A pointer to the start CellCache. More... | |
| CellCache * | m_endCache |
| A pointer to the end CellCache. More... | |
| CellCache * | m_currentCache |
| A pointer to the currently used CellCache. More... | |
| Zone * | m_startZone |
| Zone * | m_endZone |
| int32_t | m_startCoordInt |
| The start coordinate as an int32_t. More... | |
| int32_t | m_lastStartCoordInt |
| The last used start coordinate as an int32_t. More... | |
| int32_t | m_destCoordInt |
| The destination coordinate as an int32_t. More... | |
| int32_t | m_lastDestCoordInt |
| The last used destination coordinate as an int32_t. More... | |
| int32_t | m_next |
| The next coordinate to check out. More... | |
| std::vector< int32_t > | m_spt |
| The shortest path tree. More... | |
| std::vector< int32_t > | m_sf |
| The search frontier. More... | |
| std::vector< double > | m_gCosts |
| A table to hold the costs. More... | |
| PriorityQueue< int32_t, double > | m_sortedFrontier |
| Priority queue to hold nodes on the sf in order. More... | |
| std::list< Cell * > | m_betweenTargets |
| List of targets that need to be solved to reach the real target. More... | |
| bool | m_foundLast |
| Indicates if last between target could be achieved. More... | |
| Path | m_path |
| Path to which all steps are added. More... | |
Additional Inherited Members | |
| Public Types inherited from FIFE::RoutePatherSearch | |
| enum | SearchStatus { search_status_failed, search_status_complete, search_status_incomplete } |
| An enumeration of the different status the search can be in. More... | |
| Protected Member Functions inherited from FIFE::RoutePatherSearch | |
| void | setSearchStatus (const SearchStatus status) |
| Sets the current status of the search. More... | |
| Protected Attributes inherited from FIFE::RoutePatherSearch | |
| Route * | m_route |
| Pointer to route. More... | |
| bool | m_specialCost |
| Indicates if the search should use special costs. More... | |
| bool | m_multicell |
| Indicates if the route is for a multi cell object. More... | |
| bool | m_ignoreDynamicBlockers |
| Indicates if dynamic blockers should be ignored. More... | |
| std::vector< Cell * > | m_ignoredBlockers |
| Blockers from a multi cell object which should be ignored. More... | |
Detailed Description
MultiLayerSearch using A*.
Definition at line 45 of file multilayersearch.h.
Constructor & Destructor Documentation
◆ MultiLayerSearch()
| FIFE::MultiLayerSearch::MultiLayerSearch | ( | Route * | route, |
| const int32_t | sessionId | ||
| ) |
Constructor.
- Parameters
-
route A pointer to the route for which a path should be searched. sessionId A integer containing the session id for this search.
Definition at line 42 of file multilayersearch.cpp.
References FIFE::CellCache::getCell(), FIFE::Location::getLayerCoordinates(), FIFE::Cell::getNeighbors(), FIFE::Cell::isZoneProtected(), m_betweenTargets, m_endCache, m_endZone, m_from, FIFE::RoutePatherSearch::m_route, m_startCache, m_startZone, m_to, FIFE::ROUTE_FAILED, FIFE::RoutePatherSearch::search_status_failed, searchBetweenTargetsMap(), searchBetweenTargetsNeighbor(), FIFE::Route::setRouteStatus(), and FIFE::RoutePatherSearch::setSearchStatus().
◆ ~MultiLayerSearch()
| FIFE::MultiLayerSearch::~MultiLayerSearch | ( | ) |
Destructor.
Definition at line 107 of file multilayersearch.cpp.
Member Function Documentation
◆ calcPath()
|
virtual |
Calculates final path.
If the search is successful then a path is created.
Implements FIFE::RoutePatherSearch.
Definition at line 323 of file multilayersearch.cpp.
References FIFE::CellCache::convertIntToCoord(), FIFE::CellCache::getCell(), FIFE::CellCache::getLayer(), m_currentCache, m_lastDestCoordInt, m_lastStartCoordInt, m_path, FIFE::RoutePatherSearch::m_route, m_spt, FIFE::ROUTE_FAILED, FIFE::RoutePatherSearch::search_status_failed, FIFE::Location::setLayerCoordinates(), FIFE::Route::setPath(), FIFE::Route::setRouteStatus(), and FIFE::RoutePatherSearch::setSearchStatus().
◆ calcPathStep()
|
private |
Calculates path parts per layer.
Definition at line 297 of file multilayersearch.cpp.
References FIFE::CellCache::convertIntToCoord(), FIFE::Location::getExactLayerCoordinatesRef(), FIFE::CellCache::getLayer(), m_currentCache, m_from, m_lastDestCoordInt, m_lastStartCoordInt, m_path, FIFE::RoutePatherSearch::m_route, m_spt, FIFE::ROUTE_FAILED, FIFE::RoutePatherSearch::search_status_failed, FIFE::Location::setLayerCoordinates(), FIFE::Route::setRouteStatus(), and FIFE::RoutePatherSearch::setSearchStatus().
Referenced by updateSearch().
Here is the caller graph for this function:
◆ createSearchFrontier()
|
private |
Creates or resets the SearchFrontier.
- Parameters
-
startInt The start coordinate as integer identifier. cache A pointer to the start CellCache.
Definition at line 110 of file multilayersearch.cpp.
References FIFE::PriorityQueue< index_type, priority_type >::clear(), FIFE::CellCache::getMaxIndex(), m_gCosts, m_next, m_sf, m_sortedFrontier, m_spt, and FIFE::PriorityQueue< index_type, priority_type >::pushElement().
Referenced by updateSearch().
Here is the caller graph for this function:
◆ searchBetweenTargetsMap()
|
private |
Fetch targets from map.
Definition at line 388 of file multilayersearch.cpp.
References ABS, FIFE::PriorityQueue< index_type, priority_type >::changeElementPriority(), utf8::distance(), FIFE::PriorityQueue< index_type, priority_type >::empty(), FIFE::CellCache::getCell(), FIFE::Layer::getCellCache(), FIFE::Location::getLayer(), FIFE::Cell::getLayer(), FIFE::Cell::getLayerCoordinates(), FIFE::Location::getLayerDistanceTo(), FIFE::Map::getLayers(), FIFE::Layer::getMap(), FIFE::PriorityQueue< index_type, priority_type >::getPriorityElement(), FIFE::Cell::getTransition(), FIFE::Zone::getTransitionCells(), FIFE::CellCache::getTransitionCells(), FIFE::Cell::getZone(), FIFE::CellCache::getZones(), m_betweenTargets, m_endCache, m_endZone, m_from, FIFE::TransitionInfo::m_layer, FIFE::TransitionInfo::m_mc, m_startCache, m_startZone, utf8::next(), FIFE::PriorityQueue< index_type, priority_type >::popElement(), FIFE::PriorityQueue< index_type, priority_type >::pushElement(), FIFE::Location::setLayer(), and FIFE::Location::setLayerCoordinates().
Referenced by MultiLayerSearch().
Here is the caller graph for this function:
◆ searchBetweenTargetsNeighbor()
|
private |
Fetch targets from neighbor layers.
Definition at line 347 of file multilayersearch.cpp.
References FIFE::CellCache::getCell(), FIFE::Layer::getCellCache(), FIFE::CellCache::getLayer(), FIFE::Location::getLayerDistanceTo(), FIFE::Cell::getTransition(), FIFE::CellCache::getTransitionCells(), FIFE::Cell::getZone(), m_betweenTargets, m_endCache, m_endZone, m_from, FIFE::TransitionInfo::m_layer, FIFE::TransitionInfo::m_mc, m_startCache, m_startZone, m_to, FIFE::Location::setLayer(), and FIFE::Location::setLayerCoordinates().
Referenced by MultiLayerSearch().
Here is the caller graph for this function:
◆ updateSearch()
|
virtual |
Updates the search.
Each update checks all neighbors of the last checked coordinate and selects the most favorable.
Implements FIFE::RoutePatherSearch.
Definition at line 125 of file multilayersearch.cpp.
References ABS, calcPathStep(), FIFE::PriorityQueue< index_type, priority_type >::changeElementPriority(), FIFE::PriorityQueue< index_type, priority_type >::clear(), FIFE::CellCache::convertCoordToInt(), FIFE::CellCache::convertIntToCoord(), createSearchFrontier(), FIFE::PriorityQueue< index_type, priority_type >::empty(), FIFE::CellCache::getAdjacentCost(), FIFE::getAngleBetween(), FIFE::CellCache::getCell(), FIFE::Layer::getCellCache(), FIFE::Layer::getCellGrid(), FIFE::Cell::getCellType(), FIFE::Route::getCostId(), FIFE::CellGrid::getHeuristicCost(), FIFE::CellCache::getLayer(), FIFE::Cell::getLayer(), FIFE::Location::getLayerCoordinates(), FIFE::Cell::getLayerCoordinates(), FIFE::Route::getLimitedAreas(), FIFE::Cell::getNeighbors(), FIFE::Route::getOccupiedCells(), FIFE::PriorityQueue< index_type, priority_type >::getPriorityElement(), FIFE::RoutePatherSearch::getSearchStatus(), FIFE::Route::getZStepRange(), FIFE::Route::isAreaLimited(), FIFE::CellCache::isCellInArea(), m_betweenTargets, m_currentCache, m_destCoordInt, m_endCache, m_foundLast, m_gCosts, FIFE::RoutePatherSearch::m_ignoredBlockers, FIFE::RoutePatherSearch::m_ignoreDynamicBlockers, m_lastDestCoordInt, m_lastStartCoordInt, FIFE::TransitionInfo::m_layer, FIFE::TransitionInfo::m_mc, FIFE::RoutePatherSearch::m_multicell, m_next, FIFE::RoutePatherSearch::m_route, m_sf, m_sortedFrontier, FIFE::RoutePatherSearch::m_specialCost, m_spt, m_to, FIFE::PriorityQueue< index_type, priority_type >::popElement(), FIFE::PriorityQueue< index_type, priority_type >::pushElement(), FIFE::ROUTE_FAILED, FIFE::ROUTE_SEARCHED, FIFE::RoutePatherSearch::search_status_complete, FIFE::RoutePatherSearch::search_status_failed, FIFE::Location::setLayerCoordinates(), FIFE::Route::setRouteStatus(), FIFE::RoutePatherSearch::setSearchStatus(), FIFE::CellGrid::toMultiCoordinates(), and FIFE::PointType3D< T >::z.
Member Data Documentation
◆ m_betweenTargets
|
private |
List of targets that need to be solved to reach the real target.
Definition at line 131 of file multilayersearch.h.
Referenced by MultiLayerSearch(), searchBetweenTargetsMap(), searchBetweenTargetsNeighbor(), and updateSearch().
◆ m_currentCache
|
private |
A pointer to the currently used CellCache.
Definition at line 103 of file multilayersearch.h.
Referenced by calcPath(), calcPathStep(), and updateSearch().
◆ m_destCoordInt
|
private |
The destination coordinate as an int32_t.
Definition at line 115 of file multilayersearch.h.
Referenced by updateSearch().
◆ m_endCache
|
private |
A pointer to the end CellCache.
Definition at line 101 of file multilayersearch.h.
Referenced by MultiLayerSearch(), searchBetweenTargetsMap(), searchBetweenTargetsNeighbor(), and updateSearch().
◆ m_endZone
|
private |
Definition at line 108 of file multilayersearch.h.
Referenced by MultiLayerSearch(), searchBetweenTargetsMap(), and searchBetweenTargetsNeighbor().
◆ m_foundLast
|
private |
Indicates if last between target could be achieved.
Definition at line 133 of file multilayersearch.h.
Referenced by updateSearch().
◆ m_from
|
private |
A location object representing where the search ended.
Definition at line 96 of file multilayersearch.h.
Referenced by calcPathStep(), MultiLayerSearch(), searchBetweenTargetsMap(), and searchBetweenTargetsNeighbor().
◆ m_gCosts
|
private |
A table to hold the costs.
Definition at line 126 of file multilayersearch.h.
Referenced by createSearchFrontier(), and updateSearch().
◆ m_lastDestCoordInt
|
private |
The last used destination coordinate as an int32_t.
Definition at line 117 of file multilayersearch.h.
Referenced by calcPath(), calcPathStep(), and updateSearch().
◆ m_lastStartCoordInt
|
private |
The last used start coordinate as an int32_t.
Definition at line 113 of file multilayersearch.h.
Referenced by calcPath(), calcPathStep(), and updateSearch().
◆ m_next
|
private |
The next coordinate to check out.
Definition at line 119 of file multilayersearch.h.
Referenced by createSearchFrontier(), and updateSearch().
◆ m_path
|
private |
Path to which all steps are added.
Definition at line 135 of file multilayersearch.h.
Referenced by calcPath(), and calcPathStep().
◆ m_sf
|
private |
The search frontier.
Definition at line 124 of file multilayersearch.h.
Referenced by createSearchFrontier(), and updateSearch().
◆ m_sortedFrontier
|
private |
Priority queue to hold nodes on the sf in order.
Definition at line 128 of file multilayersearch.h.
Referenced by createSearchFrontier(), and updateSearch().
◆ m_spt
|
private |
The shortest path tree.
Definition at line 122 of file multilayersearch.h.
Referenced by calcPath(), calcPathStep(), createSearchFrontier(), and updateSearch().
◆ m_startCache
|
private |
A pointer to the start CellCache.
Definition at line 99 of file multilayersearch.h.
Referenced by MultiLayerSearch(), searchBetweenTargetsMap(), and searchBetweenTargetsNeighbor().
◆ m_startCoordInt
|
private |
The start coordinate as an int32_t.
Definition at line 111 of file multilayersearch.h.
◆ m_startZone
|
private |
Definition at line 106 of file multilayersearch.h.
Referenced by MultiLayerSearch(), searchBetweenTargetsMap(), and searchBetweenTargetsNeighbor().
◆ m_to
|
private |
A location object representing where the search started.
Definition at line 94 of file multilayersearch.h.
Referenced by MultiLayerSearch(), searchBetweenTargetsNeighbor(), and updateSearch().
The documentation for this class was generated from the following files:
- engine/core/pathfinder/routepather/multilayersearch.h
- engine/core/pathfinder/routepather/multilayersearch.cpp
